
无人车路径/车速规划实验:A*算法 & 模糊推理 C++代码实现
实验要求
- A*算法:生成一个 N x N 的二维网格,随机指定一些格子为障碍,左下角有辆车(占一个格子)要去右上角,使用 A* 算法先计算起点到终点的不撞到障碍的最短路径。
- 模糊推理:计算完后,利用路径上每个点的局部曲率,以及到周围最近障碍的距离来控制车辆的速度。要求使用模糊逻辑建立曲率小,离障碍距离远,车速快三个模糊集合,构建曲率小——车速快的关系矩阵,距离远——车速快的关系矩阵, 根据 A* 路径上每个点实际的曲率和离障碍物的距离,使用模糊推理及规则合成,得到目标在A*搜索到的路径的每个格子的瞬时速度,车辆按瞬时速度从左下到右上沿着 A* 路径行驶。
A*算法:无人车路径规划
前言
状态空间
- 定义:使用“状态”和“操作”表示问题的解决空间,由所有可能的状态和可用操作构成。
- 构成:问题可能具有的初始状态的集合 S ,操作的集合 F ,目标状态的集合 G。
最佳优先搜索
定义
OPEN表节点按估价函数 f(x) 的值排序,选择函数值最小的节点作为下一个被考察的节点。
最佳优先搜索又分为局部最佳优先搜索和全局最佳优先搜索。
局部最佳优先搜索
当一个节点 x 被扩展以后,对每个子节点按 f(x) 的值排序,并从新扩展的子节点中选择估计值最小的节点,作为下一个考察对象。
全局最佳优先搜索
在 OPEN 表中的全部节点中选择一个估价函数值 f(x) 最小的节点,作为下一个考察对象。因为选择的范围是 OPEN 表中的全部节点(而不是新扩展的子节点),所以它称为全局最佳优先搜索。
A* 算法
定义
A*算法是在启发式搜索中使用估价函数 f(n) = g(n) + h(n) 的搜索算法。
其中:
- g(n) 表示从初始结点到任意结点 n 的代价
- h(n) 表示从结点 n 到目标点的启发式评估代价。
h(n) 被称为启发式函数,它告诉 A* 从任意结点 n 到目标结点的最小代价评估值。
A* 算法与 A 算法的区别
A* 算法要求 h(n) ≤ h*(n),对 h(n) 进行了限制,是优化版的 A 算法。
g(n) 和 h(n) 的比重
- g(n) 的比重越大,搜索方式就越倾向 Dijkstra 算法/广度优先搜索,关注路径的累积代价,确保找到从起点到所有节点的最短路径。
- h(n) 的比重越大,越倾向于最佳优先搜索/深度优先搜索,只关注到目标的估计距离,可能会更快找到一个解,但不一定是最优解。
Dijkstra 算法/广度优先搜索、最佳优先搜索/深度优先搜索的异同点
1. Dijkstra 算法与广度优先搜索
共同点:
- 扩展方式:Dijkstra 算法和广度优先搜索都从起始节点开始,逐层向外扩展。
- 遍历结构:两者都确保在扩展每一层的所有节点之前不会深入到下一层,这使得它们在无权图中都可以找到最短路径。
区别:
- 代价的考量:Dijkstra 算法适用于加权图,优先扩展代价(路径长度)较低的节点,以找到从起点到所有节点的最短路径。而广度优先搜索适用于无权图,直接按照层次顺序扩展节点,找到的路径是层数最少的路径。
- 适用性:Dijkstra 算法可以用于加权图求解最短路径,但广度优先搜索仅适用于无权图的最短路径搜索。
因此,当 Dijkstra 算法用于无权图时,它的行为与广度优先搜索几乎完全一致,因为在无权图中所有边的代价相等,可以看作是广度优先搜索的推广。
2. 最佳优先搜索与深度优先搜索
共同点:
- 倾向快速逼近目标:两者在某些情况下可能会深入到搜索树的较深层级,追求尽早找到目标节点,而不是逐层扩展。
区别:
- 搜索控制依据:最佳优先搜索基于启发式估价函数 h(n)h(n)h(n),优先扩展离目标估计代价最小的节点。它不保证找到最优解,但能快速逼近目标。深度优先搜索则不依赖启发信息,仅是按照最近生成的节点优先扩展,可能无意中深入错误方向,并且不能保证最优解。
- 应用场景:最佳优先搜索在路径估计信息明确且启发函数有效时效果较好,而深度优先搜索适用于解空间大、且不需要找到最优解的情况,如某些问题的简单解。
总结:最佳优先搜索类似于一种带有“方向感”的深度优先搜索,它利用启发函数来选择路径,并尝试快速达到目标位置,而深度优先搜索则完全不考虑目标距离。
算法流程
基本思想:从初始节点开始,按照 f(n) 值选择最小的节点进行扩展,直到找到目标节点。
1. 数据结构
- 节点结构定义:每个
Node包含坐标x和y,从起点到当前节点的总代价f,以及路径代价g和启发式估计h,还有指向父节点的指针parent。 - 启发式函数 h:
heuristic函数用曼哈顿距离计算从当前节点到目标节点的估算代价。 - OPEN表:
openList用于存储待处理的节点,优先队列将自动根据f值对节点排序,优先处理f值较小的节点(即总代价最低的节点)。 - CLOSED表:
closedList存储已处理的节点,避免重复访问。
2. A*算法流程
a. 初始化
- 手动输入网格大小和障碍物数量
- 随机生成障碍物,并确保起点和终点处没有障碍
- 创建起点和目标点节点,并将起点加入OPEN表
b. 循环处理
-
若OPEN表不为空,则执行:
- 从OPEN表中取出
f值最小的节点作为当前处理节点current - 将
current放入CLOSED表 - 如果
current是目的地节点,则表示找到路径- 通过
parent回溯路径,将路径存入path,并返回
- 通过
- 否则,将
current节点标记为已访问,并进行下一步 - 遍历
current的四个方向邻居节点,生成新节点并计算g、h和f值,将其加入OPEN表- 边界和障碍检查:确保邻居节点可通行
- CLOSED表检查:若邻居节点已在CLOSED表中,说明已处理过,跳过
- 从OPEN表中取出
-
若OPEN表为空,则说明不可达,跳出循环,返回空
path
c. 输出结果
- 根据
path输出路线图
欧几里得距离:顶点跟终点之间的直线距离。
曼哈顿距离:两点之间横纵坐标的距离之和。计算的过程只涉及加减法、符号位反转,所以比欧几里得距离更加高效。
各模块代码实现
数据结构定义
节点结构体
#define x first
#define y second
typedef pair<int, int> PII;
// 节点结构体
struct Node {
int x, y; // 坐标
int g, h, f; // g为起点到当前节点的代价,h为启发式评估代价,f = g + h 为总代价
Node* parent; // 指向父节点的指针
Node(int x, int y, int g = 0, int h = 0, Node* parent = nullptr)
: x(x), y(y), g(g), h(h), f(g + h), parent(parent) {}
};
网格
int n; // 网格大小
cout << "请输入网格大小N: ";
cin >> n;
vector<vector<int>> grid(n, vector<int>(n, 0)); // 初始化网格,0表示通路,1表示障碍
启发式函数
// 启发式函数,使用曼哈顿距离作为函数值h
int heuristic(int x1, int y1, int x2, int y2) {
return abs(x1 - x2) + abs(y1 - y2);
}
其他功能
随机生成障碍物
int obstacles;
cout << "请输入障碍数量: ";
cin >> obstacles;
for (int i = 0; i < obstacles; ++i) {
int x = rand() % n;
int y = rand() % n;
// 确保起点、终点和已设置的障碍物位置不会重复
if (grid[x][y] == 1 || (x == 0 && y == 0) || (x == n - 1 && y == n - 1)) {
--i; // 遇到重复障碍物位置则重新生成
continue;
}
grid[x][y] = 1; // 设置障碍物
}
检查下一格是否能通行
// 检查当前节点是否能通行(越界、障碍物检测)
bool isAvailable(int x, int y, const vector<vector<int>>& grid, int n) {
return (x >= 0 && x < n && y >= 0 && y < n && grid[x][y] == 0);
}
比较器
// 比较器,用于优先队列,保证节点f值越小优先级越高
struct Compare {
bool operator()(const Node* a, const Node* b) {
return a->f > b->f;
}
};
A*算法流程
// A*算法主流程
vector<PII> aStar(const vector<vector<int>>& grid, int n) {
// 初始化起点和终点
Node* start = new Node(0, 0, 0, heuristic(0, 0, n - 1, n - 1));
Node* goal = new Node(n - 1, n - 1);
priority_queue<Node*, vector<Node*>, Compare> openList; // OPEN表:优先队列,用于存储待处理的节点,f值小的节点优先
unordered_set<int> closedList; // CLOSED表,使用哈希表存储已访问节点
openList.push(start); // 将起点加入OPEN表
// 定义上下左右四个方向,用于遍历邻居节点
vector<PII> directions = { {-1, 0}, {1, 0}, {0, -1}, {0, 1} };
// A*算法主循环
while (!openList.empty()) {
// 处理OPEN表中f值最小的节点
Node* current = openList.top();
openList.pop();
// 将当前节点标记为已访问,为每个坐标生成一个唯一的整数键 x*n+y
closedList.insert(current->x * n + current->y);
// 检查是否到达目标点
if (current->x == goal->x && current->y == goal->y) {
// 如果到达目标点,则回溯路径并返回
vector<PII> path;
while (current) {
path.push_back({ current->x, current->y });
current = current->parent;
}
//reverse(path.begin(), path.end());
return path;
}
// 遍历当前节点的四个方向上的邻居节点
for (auto& d : directions) {
int nx = current->x + d.x;
int ny = current->y + d.y;
// 检查邻居节点是否能够通行,且未被访问过
if (isAvailable(nx, ny, grid, n) && closedList.find(nx * n + ny) == closedList.end()) {
int g = current->g + 1; // 计算从起点到邻居节点的代价
int h = heuristic(nx, ny, goal->x, goal->y); // 估算从邻居节点到目标节点的代价
openList.push(new Node(nx, ny, g, h, current)); // 将该邻居节点指向父节点,并加入开放列表
}
}
}
// 如果未找到路径,返回空路径
return {};
}
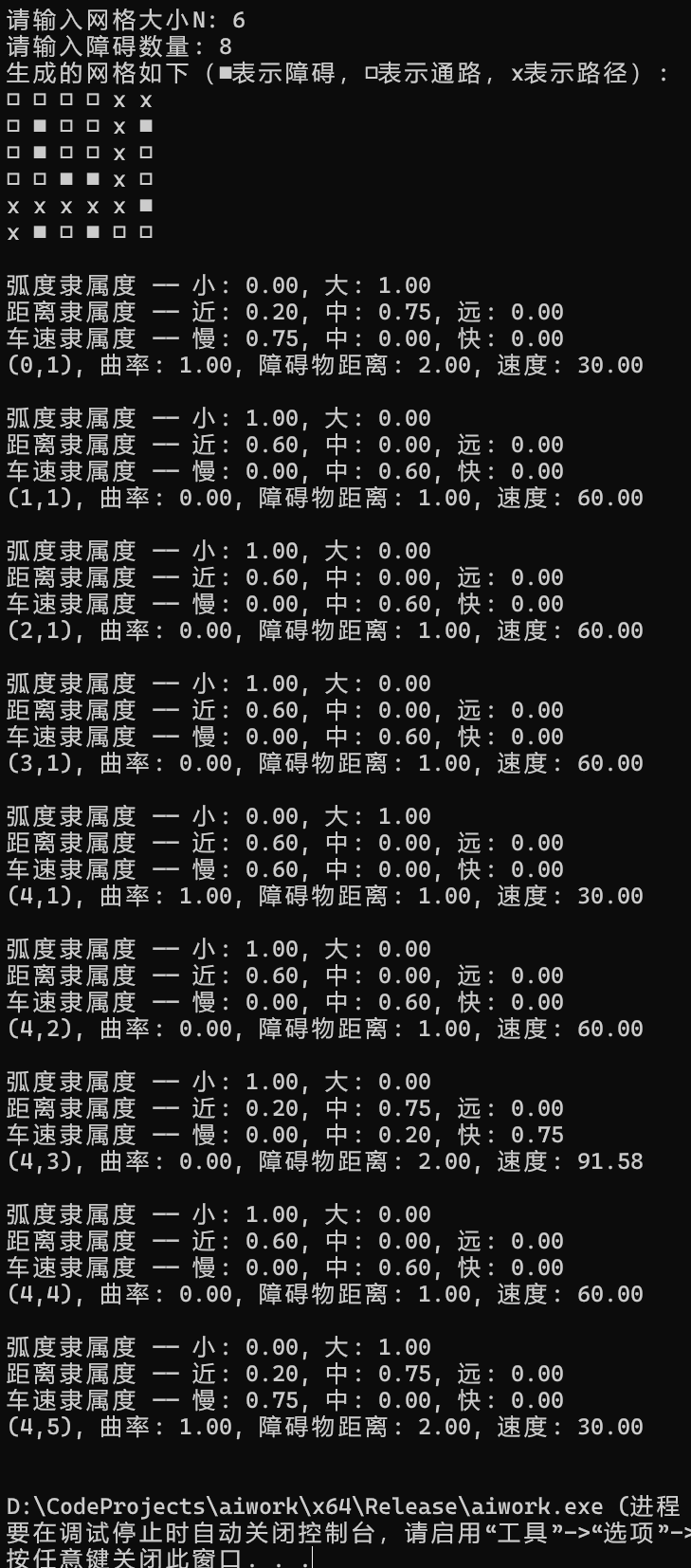
实验结果
模糊推理:无人车车速规划
算法流程
1. 模糊逻辑的建立
模糊集合
-
输入变量:
- 曲率:小、中、大**(这里只考虑上下左右四个方向的移动,所以曲率统一只有 0 和 1!)**
- 障碍物距离:近、中、远
-
输出变量:
- 车辆速度:慢(30km/h)、中(60km/h)、快(100km/h)
隶属函数
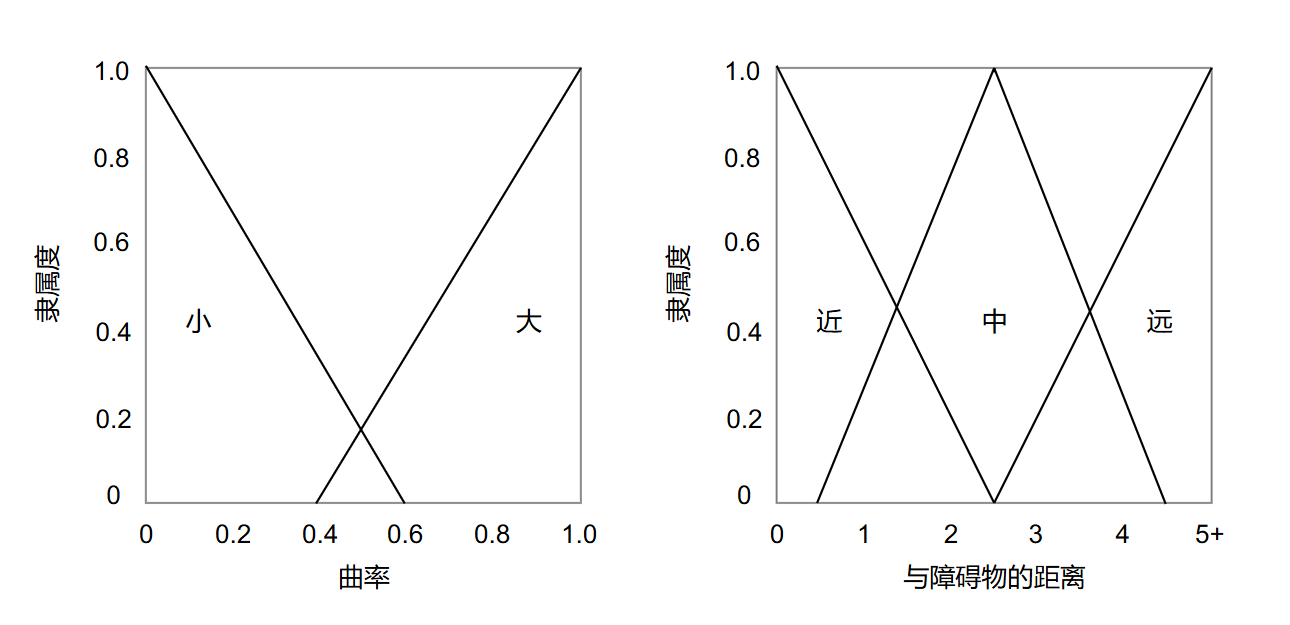
以 Zadeh 表示法,隶属函数定义如下:
曲率:
障碍物距离:
2. 模糊规则和关系矩阵的建立
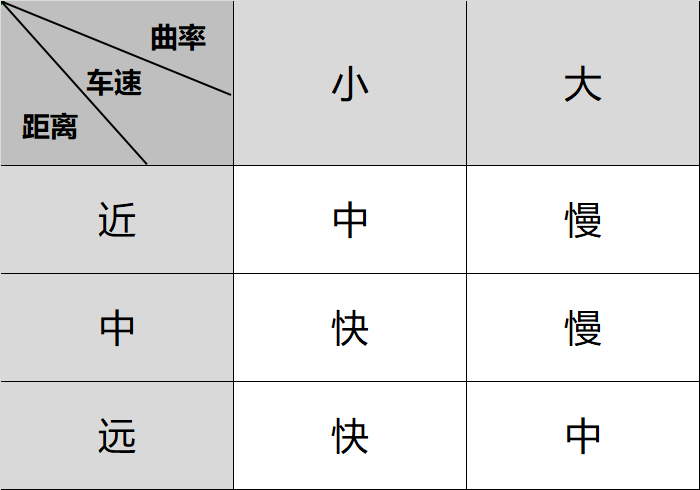
(1)模糊规则
基于专家经验,通过 IF-THEN 语句建立以下 9 条规则:
- 如果曲率小且距离近,则速度中
- 如果曲率小且距离中,则速度快
- 如果曲率小且距离远,则速度快
- 如果曲率大且距离近,则速度慢
- 如果曲率大且距离中,则速度慢
- 如果曲率大且距离远,则速度中
每条规则对应输入到输出的模糊关系。
(2)模糊关系矩阵
将模糊规则转化为关系矩阵,表示输入变量的模糊集合到输出变量的模糊集合的映射。
3. 模糊推理与清晰化
-
输入变量模糊化:使用隶属函数,计算每个输入集合的隶属度值。
-
计算模糊控制规则的强度:遍历所有规则,计算规则激活程度,激活程度等于模糊关系矩阵中对应组合条件的隶属度的最小值(最小算子运算)。
例子:
若规则a:曲率大,障碍物距离近 --> 车速慢
- 曲率对“大”隶属度为0.1,障碍物距离对“近”隶属度为0.075,则 规则a的激活程度 = min(0.1, 0.075) = 0.075
-
确定模糊输出:使用最大值法,合成所有规则对每个输出模糊集合的贡献,计算出输出模糊集合的隶属度值。
例子:
假设贡献了“车速慢”的规则有以下两条:
规则b:曲率(大)隶属度为0.53,障碍物距离(中)隶属度为0.467 --> 车速慢。激活程度 = min(0.53, 0.467) = 0.467
规则c:曲率(中)隶属度为0.10,障碍物距离(近)隶属度为0.467 --> 车速慢。激活程度 = min(0.10, 0.467) = 0.1
最终,“车速慢"的隶属度是规则b和规则c激活程度的较大者 0.467
-
去模糊化:使用加权平均判决法进行去模糊化。
例子:
- 车速慢的隶属度:0.467
- 车速中的隶属度:0.075
- 车速快的隶属度:0
使用加权平均判决法计算最终车速得:
v = (0.467 * 30 + 0.075 * 60 + 0 *100) / (0.467 + 0.075 + 0) = 34.15 (km/h)
模糊推理模块代码实现
class FuzzyInference {
private:
// 定义隶属函数(曲率和障碍物距离)
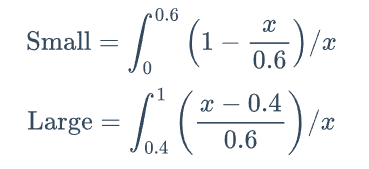
double curvatureSmall(double curvature) {
if (curvature <= 0.6) return 1 - curvature / 0.6;
return 0;
}
double curvatureLarge(double curvature) {
if (curvature >= 0.4) return (curvature - 0.4) / 0.6;
return 0;
}
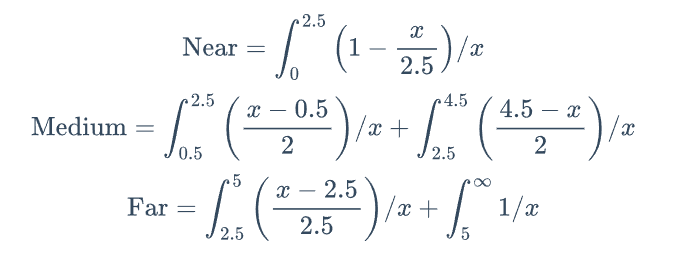
double distanceNear(double distance) {
if (distance <= 2.5) return 1 - distance / 2.5;
return 0;
}
double distanceMedium(double distance) {
if (distance > 1 && distance <= 2.5) return (distance - 0.5) / 2;
if (distance > 2.5 && distance <= 4.5) return (4.5 - distance) / 2;
return 0;
}
double distanceFar(double distance) {
if (distance > 2.5 && distance <= 5) return (distance - 2.5) / 2.5;
if (distance > 5) return 1.0;
return 0;
}
// 计算曲率
double computeCurvature(PII prev, PII next) {
// 计算两段的方向向量
int dx = abs(prev.x - next.x);
int dy = abs(prev.y - next.y);
// 方向变化的条件:一个水平,一个垂直
if (dx == 1 && dy == 1) {
return 1.0; // 曲率为 1(直角转弯)
}
return 0.0; // 曲率为 0(直线)
}
// 计算某点到最近障碍物的距离
double computeDistance(int x, int y, const vector<vector<int>>& grid, int n) {
// 简化版本:检查八个方向上的最小距离
int minDist = n;
for (int i = -1; i <= 1; ++i) {
for (int j = -1; j <= 1; ++j) {
if (i == 0 && j == 0) continue;
int nx = x + i, ny = y + j;
if (nx >= 0 && nx < n && ny >= 0 && ny < n && grid[nx][ny] == 1) {
minDist = min(minDist, abs(nx - x) + abs(ny - y));
}
}
}
return minDist;
}
// 模糊推理函数
double fuzzyInference(double curvature, double distance) {
// 计算输入的隶属度
double smallCurvature = min(curvatureSmall(curvature), 1.0);
double largeCurvature = min(curvatureLarge(curvature), 1.0);
double nearDistance = min(distanceNear(distance), 1.0);
double mediumDistance = min(distanceMedium(distance), 1.0);
double farDistance = min(distanceFar(distance), 1.0);
cout << "弧度隶属度 —— 小: " << smallCurvature << ", 大: " << largeCurvature << endl;
cout << "距离隶属度 —— 近: " << nearDistance << ", 中: " << mediumDistance << ", 远: " << farDistance << endl;
// 模糊规则的激活程度(最小值法)
double rule1 = min(smallCurvature, nearDistance); // 曲率小,距离近 -> 车速中
double rule2 = min(smallCurvature, mediumDistance); // 曲率小,距离中 -> 车速快
double rule3 = min(smallCurvature, farDistance); // 曲率小,距离远 -> 车速快
double rule4 = min(largeCurvature, nearDistance); // 曲率大,距离近 -> 车速慢
double rule5 = min(largeCurvature, mediumDistance); // 曲率大,距离中 -> 车速慢
double rule6 = min(largeCurvature, farDistance); // 曲率大,距离远 -> 车速中
// 根据规则矩阵,输出的隶属度
double slowSpeed = max({ rule4, rule5 });
double mediumSpeed = max({ rule1, rule6 });
double fastSpeed = max({ rule2, rule3 });
cout << "车速隶属度 —— 慢: " << slowSpeed << ", 中: " << mediumSpeed << ", 快: " << fastSpeed << endl;
// 去模糊化,计算最终车速(加权平均法)
double speed = (slowSpeed * 30 + mediumSpeed * 60 + fastSpeed * 100) / (slowSpeed + mediumSpeed + fastSpeed);
return speed;
}
public:
// 计算路径上每个点的车速
void computeSpeeds(const vector<PII>& path, const vector<vector<int>>& grid, int n) {
for (auto i = 1; i < path.size() - 1; ++i) {
int x = path[i].x;
int y = path[i].y;
// 确定用于计算曲率的前后两点
PII prev = { path[i - 1].x, path[i - 1].y };
PII next = { path[i + 1].x, path[i + 1].y };
double curvature = computeCurvature(prev, next);
// 计算障碍物距离
double distance = computeDistance(x, y, grid, n);
// 使用模糊推理来计算车速
double speed = fuzzyInference(curvature, distance);
cout << fixed << setprecision(2) << "(" << x << "," << y << "), 曲率: " << curvature
<< ", 障碍物距离: " << distance << ", 速度: " << speed << endl << endl;
}
}
};
实验结果
整个程序的完整代码
#include <iostream>
#include <iomanip>
#include <vector>
#include <queue>
#include <unordered_set>
#include <cmath>
#include <algorithm>
#include <ctime>
#include <utility>
using namespace std;
#define x first
#define y second
typedef pair<int, int> PII;
// 节点结构体
struct Node {
int x, y; // 坐标
int g, h, f; // g为起点到当前节点的代价,h为启发式评估代价,f = g + h 为总代价
Node* parent; // 指向父节点的指针
Node(int x, int y, int g = 0, int h = 0, Node* parent = nullptr)
: x(x), y(y), g(g), h(h), f(g + h), parent(parent) {}
};
class FuzzyInference {
private:
// 定义隶属函数(曲率和障碍物距离)
double curvatureSmall(double curvature) {
if (curvature <= 0.6) return 1 - curvature / 0.6;
return 0;
}
double curvatureLarge(double curvature) {
if (curvature >= 0.4) return (curvature - 0.4) / 0.6;
return 0;
}
double distanceNear(double distance) {
if (distance <= 2.5) return 1 - distance / 2.5;
return 0;
}
double distanceMedium(double distance) {
if (distance > 1 && distance <= 2.5) return (distance - 0.5) / 2;
if (distance > 2.5 && distance <= 4.5) return (4.5 - distance) / 2;
return 0;
}
double distanceFar(double distance) {
if (distance > 2.5 && distance <= 5) return (distance - 2.5) / 2.5;
if (distance > 5) return 1.0;
return 0;
}
// 计算曲率
double computeCurvature(PII prev, PII next) {
// 计算两段的方向向量
int dx = abs(prev.x - next.x);
int dy = abs(prev.y - next.y);
// 方向变化的条件:一个水平,一个垂直
if (dx == 1 && dy == 1) {
return 1.0; // 曲率为 1(直角转弯)
}
return 0.0; // 曲率为 0(直线)
}
// 计算某点到最近障碍物的距离
double computeDistance(int x, int y, const vector<vector<int>>& grid, int n) {
// 简化版本:检查八个方向上的最小距离
int minDist = n;
for (int i = -1; i <= 1; ++i) {
for (int j = -1; j <= 1; ++j) {
if (i == 0 && j == 0) continue;
int nx = x + i, ny = y + j;
if (nx >= 0 && nx < n && ny >= 0 && ny < n && grid[nx][ny] == 1) {
minDist = min(minDist, abs(nx - x) + abs(ny - y));
}
}
}
return minDist;
}
// 模糊推理函数
double fuzzyInference(double curvature, double distance) {
// 计算输入的隶属度
double smallCurvature = min(curvatureSmall(curvature), 1.0);
double largeCurvature = min(curvatureLarge(curvature), 1.0);
double nearDistance = min(distanceNear(distance), 1.0);
double mediumDistance = min(distanceMedium(distance), 1.0);
double farDistance = min(distanceFar(distance), 1.0);
cout << "弧度隶属度 —— 小: " << smallCurvature << ", 大: " << largeCurvature << endl;
cout << "距离隶属度 —— 近: " << nearDistance << ", 中: " << mediumDistance << ", 远: " << farDistance << endl;
// 模糊规则的激活程度(最小值法)
double rule1 = min(smallCurvature, nearDistance); // 曲率小,距离近 -> 车速中
double rule2 = min(smallCurvature, mediumDistance); // 曲率小,距离中 -> 车速快
double rule3 = min(smallCurvature, farDistance); // 曲率小,距离远 -> 车速快
double rule4 = min(largeCurvature, nearDistance); // 曲率大,距离近 -> 车速慢
double rule5 = min(largeCurvature, mediumDistance); // 曲率大,距离中 -> 车速慢
double rule6 = min(largeCurvature, farDistance); // 曲率大,距离远 -> 车速中
// 根据规则矩阵,输出的隶属度
double slowSpeed = max({ rule4, rule5 });
double mediumSpeed = max({ rule1, rule6 });
double fastSpeed = max({ rule2, rule3 });
cout << "车速隶属度 —— 慢: " << slowSpeed << ", 中: " << mediumSpeed << ", 快: " << fastSpeed << endl;
// 去模糊化,计算最终车速(加权平均法)
double speed = (slowSpeed * 30 + mediumSpeed * 60 + fastSpeed * 100) / (slowSpeed + mediumSpeed + fastSpeed);
return speed;
}
public:
// 计算路径上每个点的车速
void computeSpeeds(const vector<PII>& path, const vector<vector<int>>& grid, int n) {
for (auto i = 1; i < path.size() - 1; ++i) {
int x = path[i].x;
int y = path[i].y;
// 确定用于计算曲率的前后两点
PII prev = { path[i - 1].x, path[i - 1].y };
PII next = { path[i + 1].x, path[i + 1].y };
double curvature = computeCurvature(prev, next);
// 计算障碍物距离
double distance = computeDistance(x, y, grid, n);
// 使用模糊推理来计算车速
double speed = fuzzyInference(curvature, distance);
cout << fixed << setprecision(2) << "(" << x << "," << y << "), 曲率: " << curvature
<< ", 障碍物距离: " << distance << ", 速度: " << speed << endl << endl;
}
}
};
// 比较器,用于优先队列,保证节点f值越小优先级越高
struct Compare {
bool operator()(const Node* a, const Node* b) {
return a->f > b->f;
}
};
// 启发式函数,使用曼哈顿距离作为函数值h
int heuristic(int x1, int y1, int x2, int y2) {
return abs(x1 - x2) + abs(y1 - y2);
}
// 检查当前节点是否能通行(越界、障碍物检测)
bool isAvailable(int x, int y, const vector<vector<int>>& grid, int n) {
return (x >= 0 && x < n && y >= 0 && y < n && grid[x][y] == 0);
}
// A*算法主流程
vector<PII> aStar(const vector<vector<int>>& grid, int n) {
// 初始化起点和终点
Node* start = new Node(0, 0, 0, heuristic(0, 0, n - 1, n - 1));
Node* goal = new Node(n - 1, n - 1);
priority_queue<Node*, vector<Node*>, Compare> openList; // OPEN表:优先队列,用于存储待处理的节点,f值小的节点优先
unordered_set<int> closedList; // CLOSED表,使用哈希表存储已访问节点
openList.push(start); // 将起点加入OPEN表
// 定义上下左右四个方向,用于遍历邻居节点
vector<PII> directions = { {-1, 0}, {1, 0}, {0, -1}, {0, 1} };
// A*算法主循环
while (!openList.empty()) {
// 处理OPEN表中f值最小的节点
Node* current = openList.top();
openList.pop();
// 将当前节点标记为已访问,为每个坐标生成一个唯一的整数键 x*n+y
closedList.insert(current->x * n + current->y);
// 检查是否到达目标点
if (current->x == goal->x && current->y == goal->y) {
// 如果到达目标点,则回溯路径并返回
vector<PII> path;
while (current) {
path.push_back({ current->x, current->y });
current = current->parent;
}
reverse(path.begin(), path.end());
return path;
}
// 遍历当前节点的四个方向上的邻居节点
for (auto& d : directions) {
int next_x = current->x + d.x;
int next_y = current->y + d.y;
// 检查邻居节点是否能够通行,且未被访问过
if (isAvailable(next_x, next_y, grid, n) && closedList.find(next_x * n + next_y) == closedList.end()) {
int g = current->g + 1; // 计算从起点到邻居节点的代价
int h = heuristic(next_x, next_y, goal->x, goal->y); // 估算从邻居节点到目标节点的代价
openList.push(new Node(next_x, next_y, g, h, current)); // 将该邻居节点指向父节点,并加入开放列表
}
}
}
// 如果未找到路径,返回空路径
return {};
}
int main() {
cout.setf(ios::fixed);
cout << setprecision(2);
int n;
cout << "请输入网格大小N: ";
cin >> n;
vector<vector<int>> grid(n, vector<int>(n, 0)); // 初始化网格,0表示通路,1表示障碍
srand(time(0)); // 设置随机种子,保证障碍物位置随机生成
int obstacles;
cout << "请输入障碍数量: ";
cin >> obstacles;
for (int i = 0; i < obstacles; ++i) {
int x = rand() % n;
int y = rand() % n;
// 确保起点、终点和已设置的障碍物位置不会重复
if (grid[x][y] == 1 || (x == 0 && y == 0) || (x == n - 1 && y == n - 1)) {
--i; // 遇到重复障碍物位置则重新生成
continue;
}
grid[x][y] = 1; // 设置障碍物
}
vector<PII> path = aStar(grid, n); // 执行A*算法获取最优路径
// 将路径标记在网格上
for (const auto& p : path) {
if (grid[p.x][p.second] == 0) {
grid[p.x][p.y] = 2; // 用2表示路径节点
}
}
// 输出网格(这里转换了坐标系的输出形式,使其看起来是第一象限)
cout << "生成的网格如下(■表示障碍,□表示通路,x表示路径):\n";
for (int i = n - 1; i >= 0; --i) {
for (int j = 0; j < n; ++j) {
if (grid[j][i] == 1) {
cout << "■ ";
}
else if (grid[j][i] == 2 || (i == 0 && j == 0)) {
cout << "x ";
}
else {
cout << "□ ";
}
}
cout << endl;
}
cout << endl;
if (path.empty()) {
cout << "无法抵达终点!" << endl;
return 0;
}
FuzzyInference fi;
fi.computeSpeeds(path, grid, n); // 开始模糊推理计算车速
system("pause");
return 0;
}